足りないデータはカサ増しすればいい、深層学習によるドローン監視システム
今回紹介するのは、AIを用いてドローンの位置情報を監視する新しいシステムです。論文では、ドローンと背景の自動合成技術を用いて画像をカサ増しする方法や、動画をフレーム(動画を構成する静止画の単位)毎にわけ、その差分のデータを学習させたりなど、様々な工夫が行われていて、面白い内容になっています。
【論文】:A Deep Learning Approach to Drone Monitoring
ドローンの普及とその問題
近年、無人飛行機=ドローンが個人用にも普及してきました。これにより、映像コンテンツの充実や新しいレクリエーション、スポーツの誕生など私たちの生活に新しい側面が生まれました。さらに、ドローンの普及によって物流の世界が大きく変わり様々な物の即時・適地配達が可能になると考えられています。

しかし、これらの発展はある種の危険もはらんでいます。その問題が表出したのが2015年に起こった首相官邸無人機落下事件です。当時話題となったので知ってる方も多いのではないでしょうか?ドローンが首相官邸に落下したことで無人機が公共の場の空を飛ぶことに対して危険視する声も多くなり、ドローンを監視する必要性が見えてきました。
今回は、サウザンカリフォルニア大学が開発したAIを用いてドローンを監視する新しいシステムについてご紹介します。一般的には、ドローンの監視方法は2通り、無線で追う方式と映像を確認し視覚的に追う方式があります。論文では、近年大きく発展している映像を確認し視覚的に追う方法を、検出と追跡を組み合わせた機会学習の技術で解決しています。
ドローン監視システムの難しい点
ドローンを映像で監視する上では、複雑で多様な背景や、多数のドローンの種類を識別できなくてはなりません。しかし、最大の難点はドローンが写った画像が手に入りにくく、訓練用ドローン画像の量が限られていることです。
今回は、データが足りないという課題をドローンと背景の自動合成技術を用いて画像をカサ増しする方法や、動画をフレーム(動画を構成する静止画の単位)毎にわけ、その差分のデータを学習させたりなど、様々な工夫を用いて解決しています。
検出機能と追跡機能、2つのモジュールに分けて学習
ドローン検出と追跡モジュールを搭載したドローン監視システムが提案されています。ここでは、それぞれ二つのモジュールに分けて学習しています。
(1)ドローン検出機能
ドローン検出機能については、あらかじめ用意したドローン画像データを2015年に発表されたfasterRCNNという畳み込みニューラルネットワークを用いて学習します。
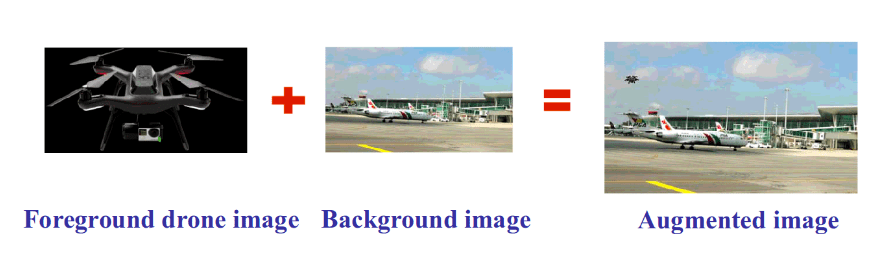
しかし、これでは全くサンプルが足りないため3Dレンダリングアルゴリズムと従来の画像生成技術を用いて、大量のドローン合成写真を自動で作り出しました。
手法としては画像をドローンと背景とに分け、多くのドローンの2D画像と3Dドローンメッシュを入手します。これを、ドローンの3Dモデルを視距離や視野角、照明条件などを変更して柔軟にレンダリングし、背景画像になじむようなドローンが飛んでいる画像を作成していきまうs。
このようにドローンの画像サンプルを作成しカサ増しすることで、インプット画像数が少ないことによる過学習(AIが勝手に間違えた学習をしてしまうこと)を防ぐことができます。
(2)追跡機能
追跡システムにはMulti-Domain Network (MDNet)という物体追跡アルゴリズムを用いて、今のフレームから次のフレームのどの位置にドローンがいるか大方見当をつけさせます。つまり、学習器に周りの複雑な風景を取り除いた、ドローンの動きだけを学習させなければなりません。
ここでは連続する画像フレームの差異をとる事で、動いてる物体のみから情報を抽出し、学習器に訓練させました。これにより、風景を含む大量の静止情報を処理する必要がなくなるので、動いている物体に注目することができます。(複雑で多様な背景を無視して動いている物体のみに注目できるため、ドローンの再検出が早くなる。)
どうなったか
この検出と追跡機能を入れ替わり立ち代り利用することで安定的なドローンの監視が可能になります。合成画像データを使わない場合と比べて、検出タスクでは、11~16%ほどスコアが上昇し、90%ほどの精度を出しました。追跡タスクについては、10%ほどスコアが上昇し、70%強の精度が出ました。
この2つの機能を統合した監視システムを用いる事で、ドローン検出機能によりドローンを検出して、追跡機能によりドローンの追跡を開始します。もし、ドローンを見失った場合でも、追跡機能によりドローンの位置は推測ができるため、素早く再度ドローン検知し、検出したら追跡機能を再度利用することでドローンを常に監視し続けることが可能になります。
幅広い応用が期待される
ドローン測量では木が生い茂る山間部では電波が届かなかったり、搭載カメラの死角でロスト/衝突という問題がありました。今回の方法を用いる事で、人間の目で見るよりも、正確にドローンを検出/追跡できるようになりました。
また、この研究は結果だけでなく手法にも注目すべきです。
今回のように「動くもの」に注目しターゲットを追跡するシステムは、野生動物の監視、天体観測などの自然環境から夜中の不審者検出などのセキュリティ面でも幅広く応用できるかもしれませんし、画像を合成しカサ増しさせるとい手法は他の機械学習テーマでも大いに活用可能です。



この記事に関するカテゴリー