本当に普及するのか?「家庭用ロボット」の最新研究
掃除, 洗濯, 食器洗いなどなどなんでもやってくれるような家庭用ロボットが欲しいというのは、様々なところで機械化・自動化が進んだ今、多くの人が感じることだと思います。しかし実際にはそのようなロボットはまだ売っていませんし見たことがないという方も多いでしょう。この記事では家庭用ロボットと、その研究の難しい部分でもある『非剛体』を扱った研究について広く紹介していきます。
本日扱う論文 Multi-Modal Sensing and Robotic Manipulation of Non-Rigid Objects: A Survey
目次
(1)普及しそうで普及していない家庭用ロボット
(2) よく使われるロボット
(3)センシング
(4)具体的なタスク
(5) まとめ
1. 普及しそうで普及していない家庭用ロボット
https://www.preferred-networks.jp/ja/news/pr20181015
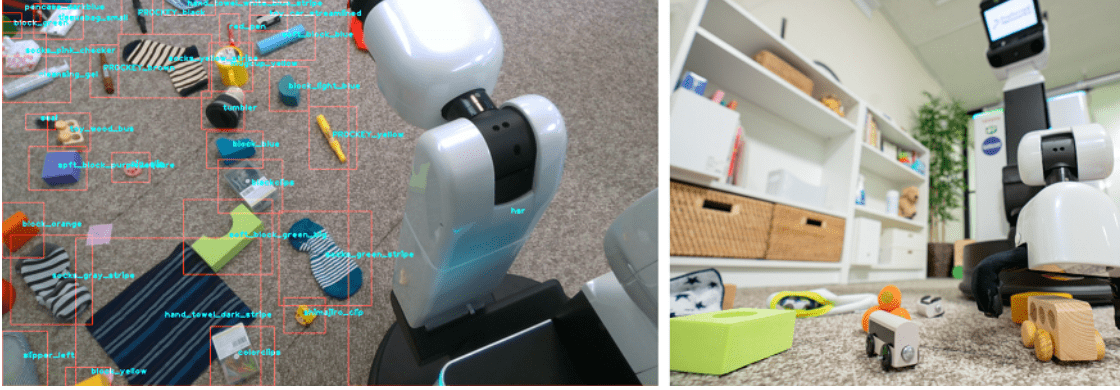
去年の10月、PFN:Preferred Networks社(日本)のお片付けロボットが世界的に注目を集めたことは記憶に新しいと思います。最先端のAI技術やロボット技術を駆使し、文房具や衣服など剛体・非剛体に関係なく散らかっているものを捌いていく様子は圧巻でした。
このような家庭用ロボットはとても需要が高そうですがなかなか普及には至っていません。その理由として(ロボットの価格が高いこともそうですが)、ロボットが洗濯物などの非剛体の扱いが不得意なことがあげられます。最近の画像認識の技術を使えばどこに何があるか特定することは容易になってきていますが、掴んだあとに変形するものを自在に扱うことは簡単ではありません。
今回紹介する論文は、非剛体を扱うロボットの様々な研究を調査したサーベイ論文になります。少し古い研究やディープラーニングを使っていない研究も含まれていますが、古くから行われてきたロボットの研究を包括的に知り、そしてロボットで何ができるのかを知るのに良い論文です。概ね論文に沿って『よく使われるロボット』、『センシング技術』、『非剛体を扱う具体的なタスク』について紹介していきます。
2. よく使われるロボット
PR2

2腕タイヤ式の家庭用を想定したロボットです。ロボットのシミュレーションや制御で幅広く使われている『ROS』というシステムを開発していたwillow garage社が開発しました。価格は40万ドルとも言われています。
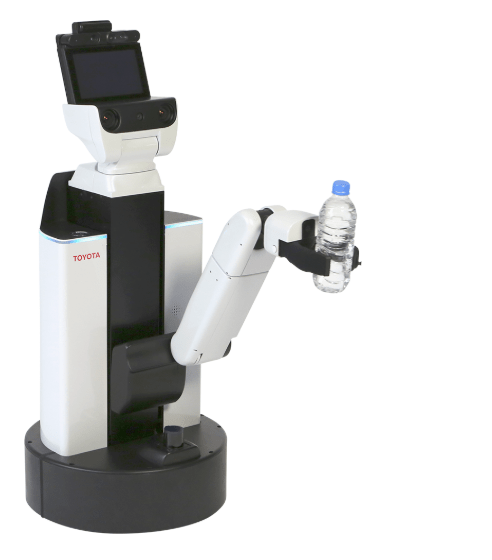
HSR
https://newsroom.toyota.co.jp/jp/detail/8709536
PFNが片付けロボットで使用していたトヨタ社製の家庭用単腕ロボットです。PR2と比べてかなりコストが抑えられていますが、背が伸びたり、手の甲に吸引器が付いていたり、頭の上にディスプレイが付いていたりと機能はとても充実しています。
3. センシング
操作するモノの状態を知るためにロボットは様々なセンサーを使います。まずあげられるのがRGBセンサーですが、深度センサーもよく一緒に使われます。2,3年前まではKinectというMicrosoft製の深度センサー付きのRGBDセンサーが広く使われていました。
特に深度センサーを使うことで机と対象物の境界を簡単に発見することができ、また対象物の細かい凹凸も検知することができます。
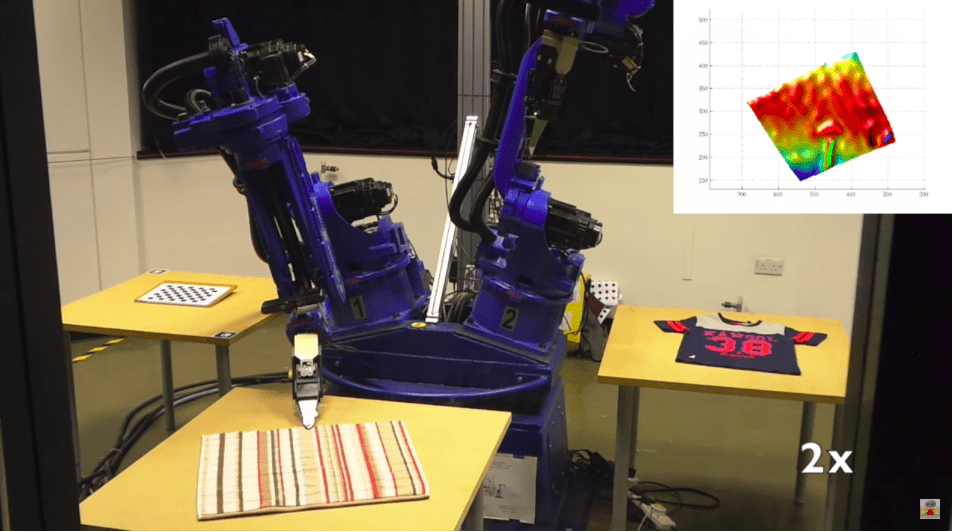
https://www.youtube.com/watch?v=Z85bW6QqdMI
また人間の触覚に対応するセンサーとして、力や振動、温度のセンサーが使われます。これら触覚のセンサーは持っているものの柔らかさや種類を予め特定したり、あるいは紐や布をピンと張るときに使います。
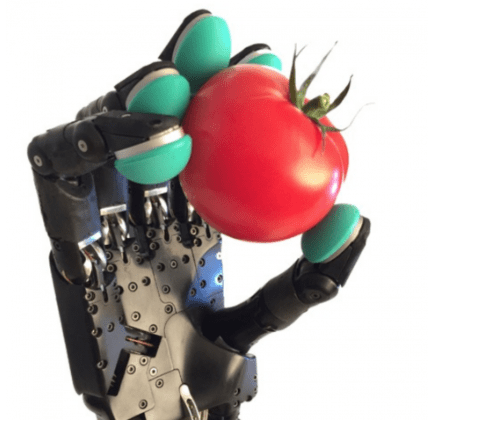
https://www.syntouchinc.com/en/syntouch-announces-the-biotac-sp/
4. 非剛体を扱うタスク
非剛体といっても、ロープ, ワイヤー, 金属板, 布, スポンジ, ゴム, 臓器, 生体組織などと様々ですが、ここではよく研究対象にされている衣類を中心的に紹介します。
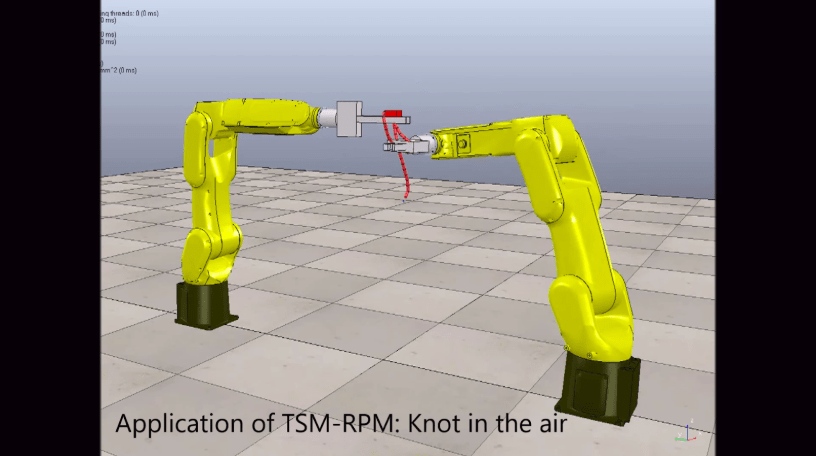
?紐を結ぶ
https://www.youtube.com/watch?v=OTKvSDmXghg
紐は非剛体の一番簡単な例としてよく使われていました。この映像の研究では紐のシミュレーターを使い、たわみも考慮しながら紐を結んでいます。
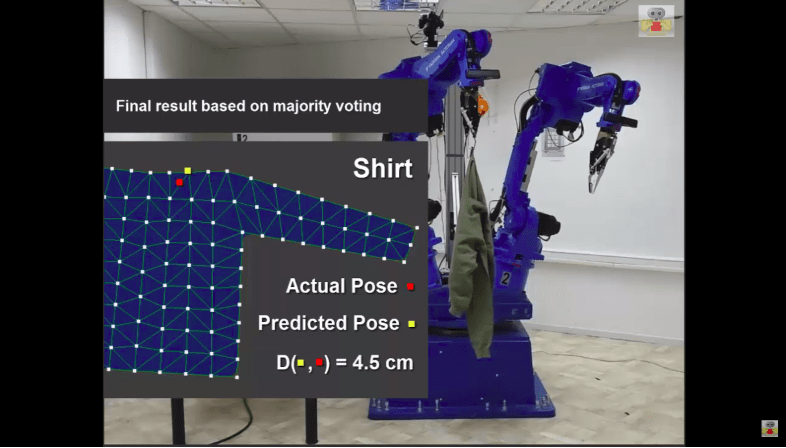
?どこを持っているか推定する
https://www.youtube.com/watch?v=P25ku9KpMVE
1種類の服に限れば、服をつまみ上げたときの様子は持つ場所によって何パターンかに分けられるので、現在服をつまみ上げている様子にCNNを使ってどのパターンに近いかを予測し、持っている場所を当てるというタスクです。
?望みの形状になるように持ち変える
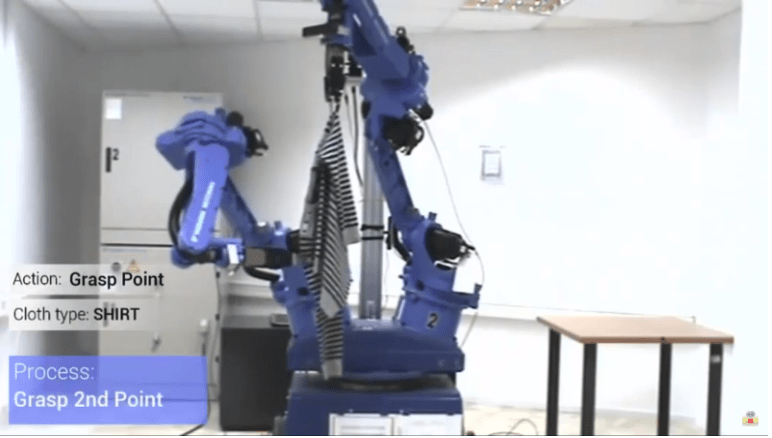
https://www.youtube.com/watch?v=YpD-ip6g5lY
つまみ上げて空中で回転させ視覚的に持つべき場所を探すような手法や、机の上にとりあえずシワができないように置き、形状を推測したのち持つべき場所を推定する手法など、様々な方法で解かれています。
?服をたたむ
決まった服をたたむこと事態はいろんな研究者が成功させていますが、この映像の研究では予めシミュレーションで服の大きさなどに合わせて最適な手の軌道を学習しておくことで、上手に服をたたむことができています。袖の位置などはヒューリスティックな手法で求めています。
?ズボン履いてもらう
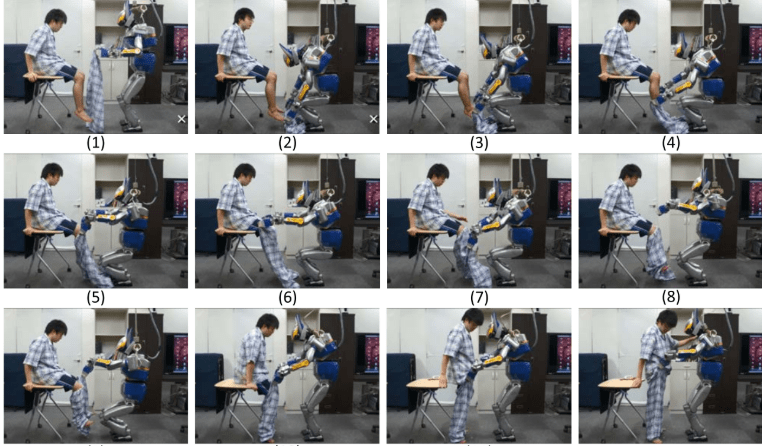
http://ais.shinshu-u.ac.jp/~aislab/papers/2014_SII_yamazaki.pdf
RGBDセンサーで人の足がどこにあるかを見つけ、足の場所に沿って上手く履けているかを監視しながら履かせています。
?上着を着させる
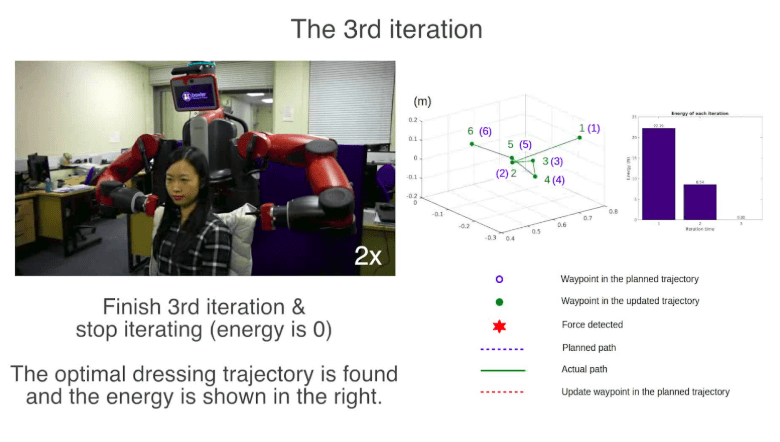
https://www.youtube.com/watch?v=LfeNms7f6t4
できるだけ人に当たらないよう、人に合わせて2, 3回の練習で上手く誘導することができています。
?人と協調してシワを伸ばす
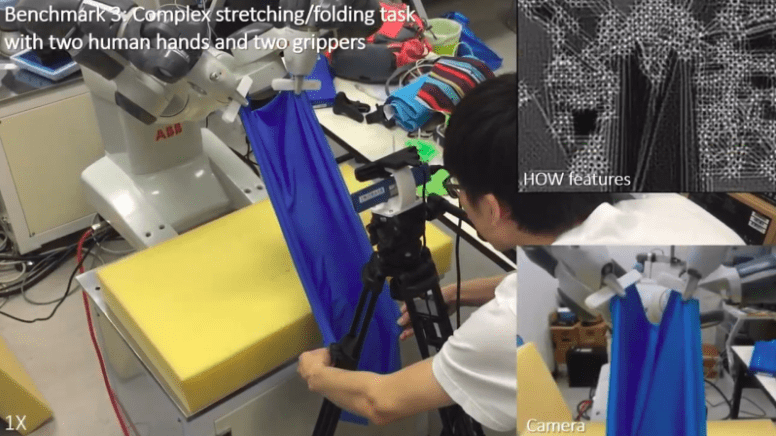
https://www.youtube.com/watch?v=AVNZy05KrPc
布の各場所のシワを評価するような特徴量を定義し、『こういうシワの時にこのように操作すれば良い』という情報を予め数10~100個ほど用意することで、それを参考にしながら上手くシワを伸ばしたり畳んだりすることができるという研究です。
?ホワイトボードを消す
https://www.youtube.com/watch?time_continue=2&v=JEuzIjzFPzc
ホワイトボード消しは柔らかいですが、トルクセンサーを使いながら、適切な加減で力を入れて一発で消せるようにしています。
5. まとめ
家庭用ロボットの今を広く紹介しました。これを読んで「あまり大したことできてないのでは?」と感じる方もいるかもしれませんが、今はまだタスクを細かく分けて少しづつクリアしていく段階とだと言えるでしょう。人は自分で思っているよりもかなり高度なことを日常的にしていて、数学的な手順を踏んでロボットにタスクを遂行させるというのは実はかなり難しいことなのだと思われます。
また逆に「洗濯物をたたんでくれるなら欲しい!」と感じた方もいるかもしれません。しかしこれまでの多くの研究では『ある服のモデル』のシミュレーションに基づいて操作しているので、どの服を渡しても必ず上手くいくというわけではありません。服の素材や形が変わっても対応できるような堅牢なロボットが求められています。
しかし総じて、家庭用ロボットの研究は多くの分野で実用レベルに近いと言えそうです。これからは冒頭で紹介したお片付けロボットのように、一連の操作を通して行えることを示したり、話し言葉で指示を受けられるようにするなどより実践的な状況を意識した研究が盛んになって来るでしょう。それらがクリアされた後、待ち望まれた家庭用ロボットの普及が見えてくるのかもしれません。



この記事に関するカテゴリー