視覚情報(Optical Flow)のみから仮想キャラクターを抑制する自立歩行システムが登場
仮想キャラクターの視野情報(カメラ)のみから障害物を回避し目標を達成する自律歩行のためのシステムが発表されました。実際の人間と同じ視覚的特徴に基いてるため、リアルな人間の歩行制御をシミュレーションすることが可能です。
参考論文 Character navigation in dynamic environments based on optical flow
オプティカルフローに基いた仮想キャラクター抑制
視覚的に説得力のあるアニメーションを作成するには、仮想キャラクターが環境内で自分の道を見つけ、障害物と衝突することなく動くための自律的なナビゲーション能力が不可欠です。
本稿では、仮想キャラクター(エージェント)を操縦するために視覚的特徴を使用する合成視覚モデルが提案さています。
仮想キャラクターと環境の間の相対的な動きによって生成される高密度のオプティカルフローに基き、仮想キャラクター(エージェント)の位置を制御することで、与えられた環境の障害を避けながら、仮想キャラクターが目標に到達することを可能にしています。
オプティカルフロー(Optical Flow)とは
オプティカルフロー(Optical Flow)とは、二枚以上の時間的に連続するデジタル画像を用いて、その画像内で共通して写っている部分などから動作やあるパターンが移動する方向を表現したものです。つまり、人間の網膜に当てはめて考えると、自身の運動や外界の変化に伴う、網膜に投映される像全体の速度場とも言えます。
ここでは入力制御変数をキャラクターによって知覚されるオプティカルフロー、すなわち網膜上に形成された2次元画像中の物体の見かけの動きに制限しています。オプティカルフローによって伝達される情報は、移動する物体や物体のグループを検出するのに十分だと仮定し、これらの情報から、仮想キャラクターは物体が近づいたり進んだりしているかどうかの推定や、衝突経路にあるかどうかを検知します。つまり推定は、キャラクターの制御とナビゲーション機能に対する入力変数として役立つ、限られた数の視覚的特徴に基づいて実行されます。
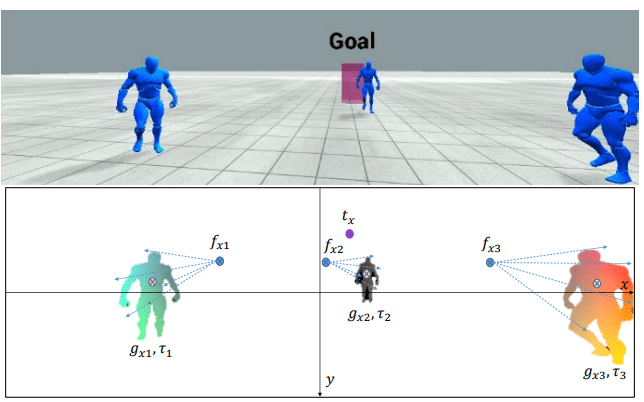
(top)エージェントによって知覚されるカラー画像。
(下)オプティカルフローから抽出された視覚的特徴。エージェントの目標tはピンク色の点に対応します。
このアプローチは、以前のものと比べていくつかの利点があります。以前のアプローチは幾何学的関係に基いた情報を利用していましたが、本アプローチは視覚的情報のみを使用しています。実際の人間が利用するものと同様の視覚的特徴に基いてるため、リアルな人間の歩行制御をシミュレーションすることが可能です。また、このナビゲーション技術は、カメラを装備したロボットなど、視覚機能を備えたシステムにも適用可能です。
どのように抑制するのか
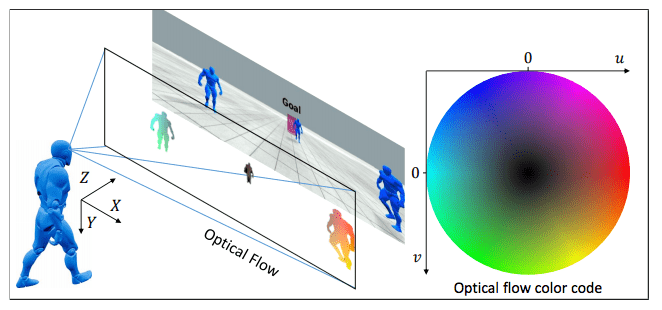
具体的にはエージェントは、環境の物体との相対的な動きから生じるオプティカルフローを知覚します(エージェントは彼らの頭の前部に仮想カメラを備えており、更新ごとにオプティカルフローとシーンの深度を記録することができます)。次にオプティカルフローをセグメント化して処理し、拡大の焦点や衝突までの時間などの視覚的特徴を抽出します。抽出した視覚的特徴とエージェントの動きの間の正式な関係を確立し、追跡、回避、到達など、キャラクターがタスクを実行できるようにする一連のモーションコントロールの法則を設計します。これらの制御関数が組み合わされて、複数の障害物を避けながら目標を達成するなど 、動的な環境でキャラクターが複雑なタスクを実行できるようになります。 エージェントの動きはこれら機能(関数)の局所的最小化によって達成されます。
実験
ナビゲーション機能の実験をシュミレーション環境で行っています。
与えられた環境の障害を避けながら、キャラクターが目標に到達するという古典的な状況で実証します。
以下のシーンでは3人のエージェントが障害物を避けて部屋を横断する必要がります。このシーンには、さまざまな形状とサイズのオブジェクトが存在します。エージェントは異なる開始位置と方向に配置され、部屋を出るために異なるパスを選択しなければなりません。

今度はエージェントが同じ運行機能を使用して他のエージェントに直面するようにします。下図はサークルシナリオを示しています。 6人のエージェントが円形の形成との反対側に到達するように任されています。
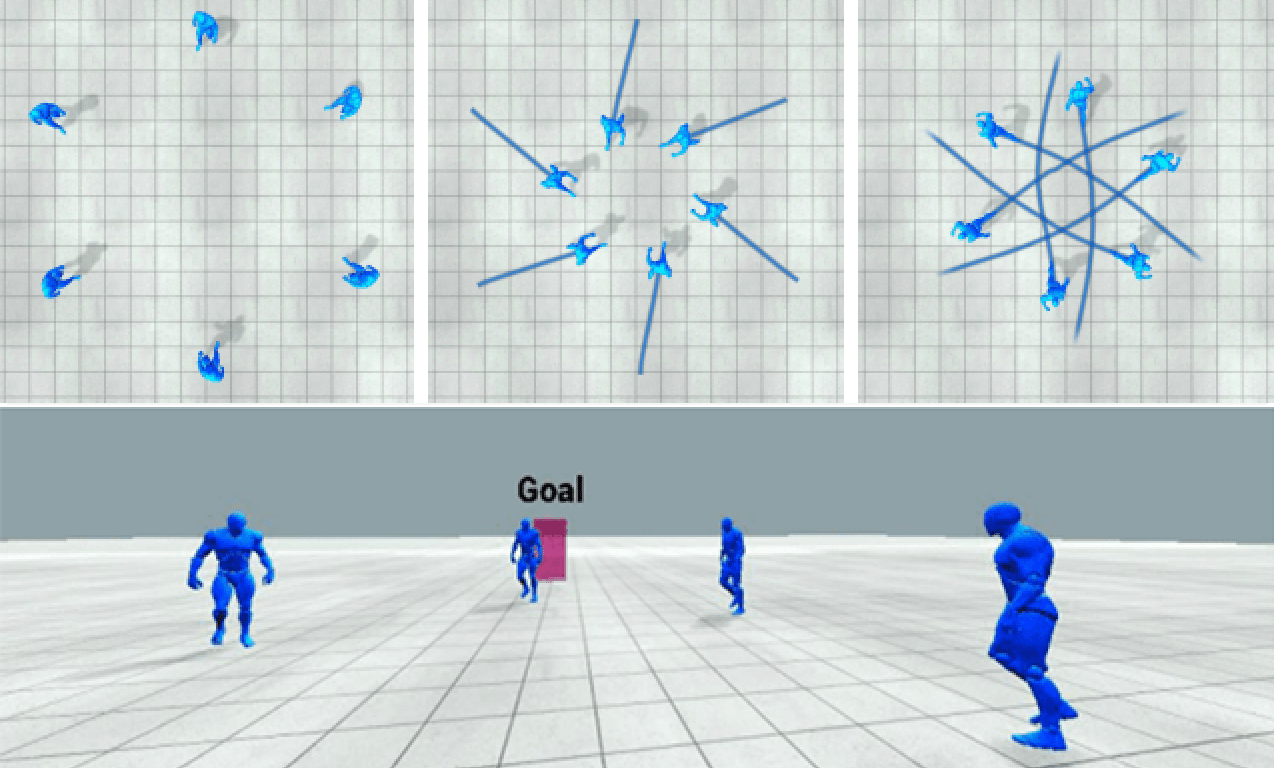
見ての通り、どちらのタスクでも、オプティカルフローから抽出されたわずかな視覚的特徴が、高レベルなナビゲーションタスクにおけるキャラクターを操縦するのに十分であることが実証されています。
しかし、解像度が低いと、空間精度が低下するため、衝突が頻繁に発生します。さらに、低解像度の画像は、対象物のセグメンテーションをより不正確にします。このようにアルゴリズムの性能は、画像の選択された解像度に依存することが分かりました。
技術の応用としては、 例えば人間の知覚行動ループの識別のような、人間のナビゲーションに影響を与える範囲の視覚的要因を考慮することに使えるかもしれません。さらに、このアプローチは、視覚的特徴(オプティカルフロー)のみに基づいているので、カメラとオプティカルフロー計算を装備したロボットなどにも適用可能です。



この記事に関するカテゴリー