Few-shot Object Detection That Does Not Forget The Base Class Either
3 main points
✔️ We developed an object detection model, Retentive R-CNN, which can detect the few-shot class without forgetting the learned base class information.
✔️ Retentive R-CNN recorded SOTA on the benchmark of few-shot detection.
✔️ The performance did not drop at all in base class detection.
Generalized Few-Shot Object Detection without Forgetting
written by Zhibo Fan, Yuchen Ma, Zeming Li, Jian Sun
(Submitted on 20 May 2021)
Comments: CVPR 2021.
Subjects: Computer Vision and Pattern Recognition (cs.CV)
code:

The images used in this article are from the paper, the introductory slides, or were created based on them.
first of all
Deep learning has shown high performance by learning with a large amount of training data, but there are situations where only a limited amount of data is available. However, there are situations where only a limited amount of data is available. A method called "few-shot learning" has been proposed to enable detection in such situations. However, conventional methods are specialized only for the detection of the few-shot class and fatally forget the information of the base class. In object detection, since a single image may contain both classes, high detection performance is required for both classes. Such a study is called Generalized Few-Shot Detection (G-FSD). In this study, we found that the transition learning-based base-class detector contains information that can improve the detection performance of both classes, and we developed a Retentive R-CNN consisting of Bias-Balanced RPN and Re-detector using them.
problem set
Let $C_b$ be the base class, $C_n$ be the few-shot class, and $D_b$ and $D_n$ be datasets containing each class. Let $D_b$ contain a sufficient amount of training data and $D_n$ contain only a small amount of training data. Our goal is to learn a model $f$ that detects the data in $D_n$ without forgetting the training information in $D_b$. In this work, we adopt the transition learning base, which requires less training time and is expected to have higher performance than the meta learning base. First, a base class detector $f^b$ is learned with $D_b$, and $f^n$ is obtained by fine tuning with $D_n$. However, the detection performance for the base class deteriorates at the fine tuning stage. To address this problem, we analyzed the Two-stage Finetuning Approach (TFA) in previous work, where TFA is first trained as a regular R-CNN with $D_b$ and the final layer of classification head and box regression head is tuned with $D_n$. The fine-tuned weights and the weights of the base detector are combined and fine-tuned again on a dataset containing equal numbers of $D_n$ and $D_b$ samples.
Retentive R-CNN
The Retentive R-CNN of the G-FSD model proposed in this paper consists of a Bias-Balanced RPN and a Re-detector that exploits the above $f^b$ information. A schematic diagram is shown in the figure below.
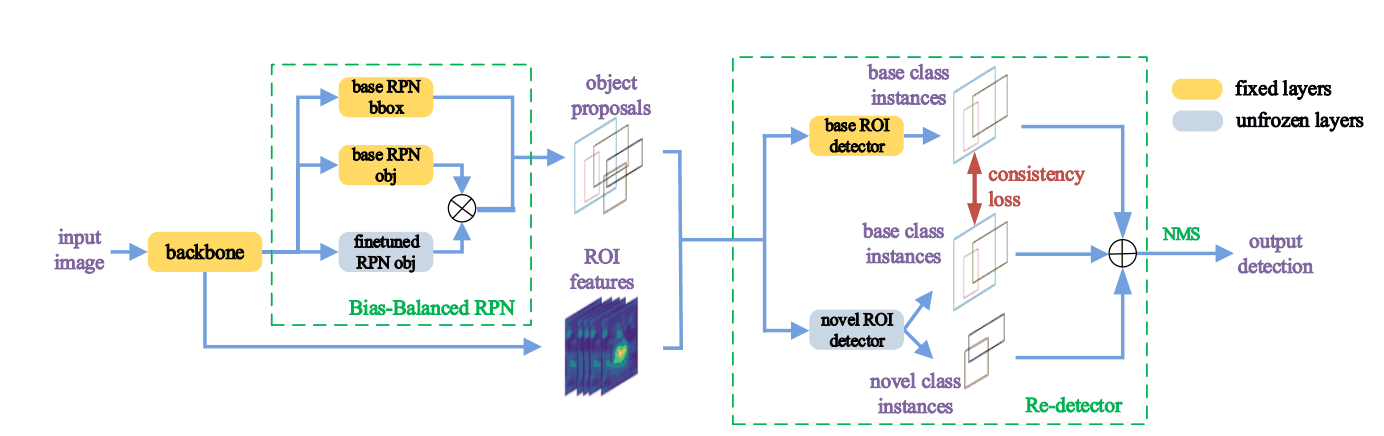
Re-detector
The Re-detector consists of two detector heads, one predicting $C_b$ objects with $f^b$ weights ($det^b$) and the other predicting $C_b \cup C_n$ objects with fine-tuned weights ($det^n$). Detecting both classes reduces false positives; as with TFA, we only fine-tuned the final layer of $det^n$ classification and box regression. To regularize $det^n$ here, we introduced an auxiliary consistency loss. If $p_c^b, p_c^n$ are the probabilities that $det^b, det^n$ predict the final class $c$, the consistency loss is as follows.
$$L_{con}=\sum_{c \in C_b}\tilde{p_c^n}\log(\frac{\tilde{p_c^n}}{\tilde{p_c^b}})$$
However, the same is true for $\tilde{p_i^n}=\frac{p_i^n}{\sum_{c \in C_b}{p_c^n}}, \tilde{p_i^b}$. The loss function of the Re-detector at the final fine tuning is
$$L_{det}=L_{cls}^n+L_{box}^n+\lambda L_{con}$$
The GetParameters() method will be used to set the balance parameter. where $\lambda$ is a balance parameter.
Bias-Balanced RPN
In R-CNN, the accuracy of RPN is very important because RPN generates object proposals. However, we fine-tuned the final layer because the trained RPNs miss the objects in the few-shot class. To keep the accuracy in the base class, we proposed a Bias-Balanced RPN that integrates the trained and fine-tuned RPNs. Given a feature map of size $H\times W$, the base RPN generates an object map $O_b^{H\times W}$, the fine-tuned RPN generates $O_n^{H \times W}$ and the final output $O^{H\times W}=max(O_b^{H \times W}, O_n^{H\times W})$ is taken. The final Retentive R-CNN loss function is as follows.
$$L_{ft}=L_{obj}^n+L_{det}$$
where $L_{obj}^n$ is the binary cross-entropy of the object layer of the fine-tuned RPN.
experimental results
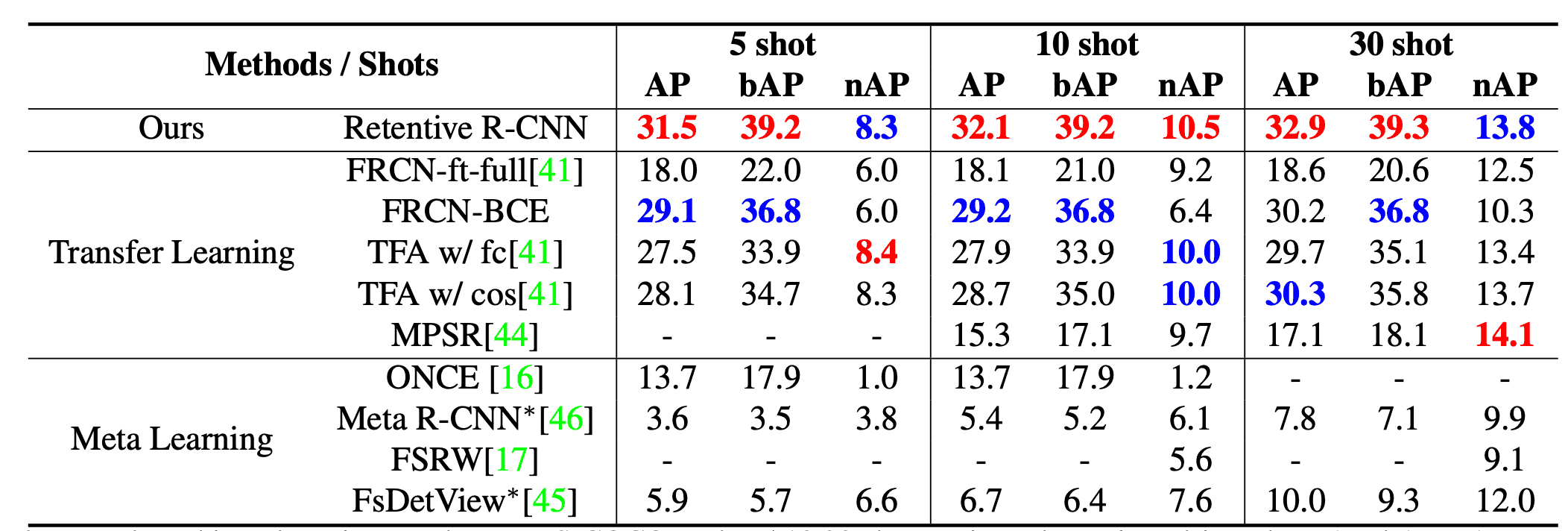
The results of each model on the MS-COCO dataset are shown in the table below, where AP, bAP, and nAP are the average goodness-of-fit for the overall, base, and few-shot classes, respectively. In particular, the Retentive R-CNN performs the best for AP and bAP at all shot counts, while another model with slightly better nAP performs much worse for bAP, and our model performs best for G-FSD.
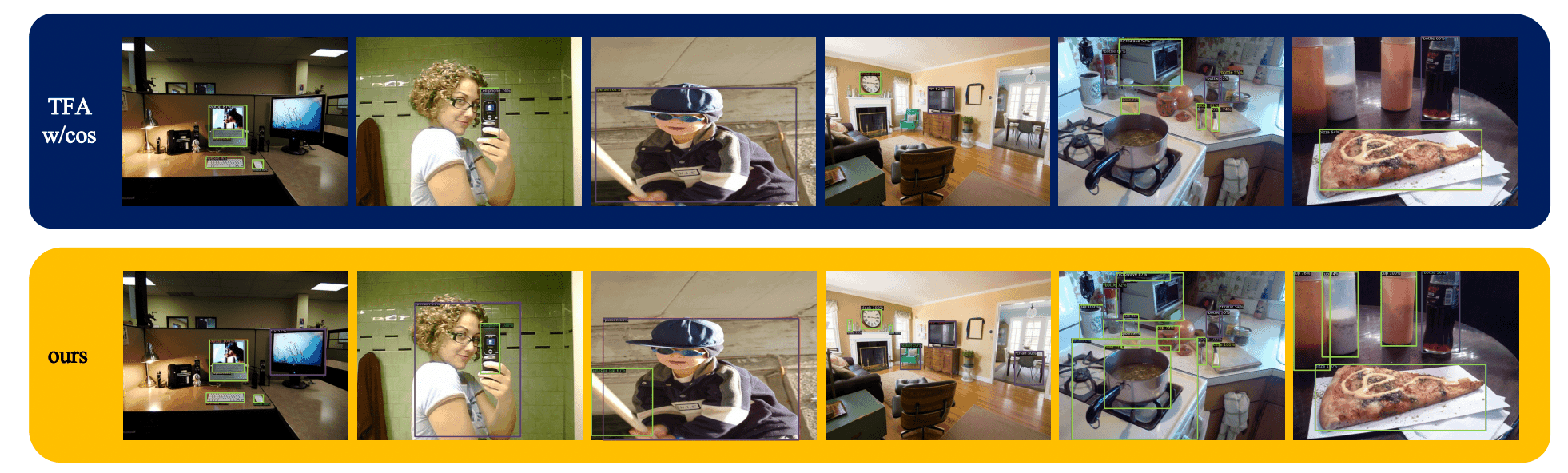
The figure below shows an example of the prediction results of Retentive R-CNN and TFA w/cos in 10-shot. As can be seen from the figure, TFA often misses hard-to-understand objects and images containing multiple objects, whereas our model detects them well.
Conclusion.
In this paper, we develop a Retentive R-CNN for G-FSD. The Retentive R-CNN achieved this by using a transition learning-based method, which exploits previously overlooked information, Bias-Balanced RPN mitigates the bias of the learned RPN, and Re-detector detects both classes with high accuracy. detection benchmark and the detection performance of the base class was not degraded. However, the difference in detection performance between the few-shot class and the base class remains large and further improvement is expected in the future.



Categories related to this article

![[PETRv2] Estimates T](https://aisholar.s3.ap-northeast-1.amazonaws.com/media/November2023/petrv2-520x300.png)