『避けられない事態』を理解する最新のプランニングロボット
AIロボットにお買い物を頼むとき、ロボットは家を出てから帰ってくるまでの計画をどのように立てれば良いでしょうか。なんでもできると思われがちなAIですが、実はプランニングは得意ではありません。今回は新たに提案された、『途中の状態をイメージしながらプランニングを行うAI』を紹介します。
論文
目次
1.プランニングの難しさ
2.未来予測で中間目標を見つけ出す
3.時間という概念にとらわれない未来予測AI
4.実験
(1) プランニングの難しさ
プランニングはとても難しい課題です。例えば「豆腐屋さんで木綿豆腐を買ってきて」とロボットにお願いしたとします。「豆腐屋へ行くにはバスに乗らなければならない」、「バスに乗るには近くのバス停まで行かなければならない」、「豆腐を買うにはお金を用意する必要がある」、「豆腐を受け取るにはボウルを持っている必要がある」などと中間の目標を正しく把握する必要があります。しかし中間の目標を立てるには事前知識として知らなければ行けないことが多く、また知っている事前知識をうまく活用できなければなりません。
他にもプランニングが難しい例としてよく上げられるものとして、『ルービックキューブ』があげられます。
https://ja.wikipedia.org/wiki/ルービックキューブ
ルービックキューブの解き方を覚えていれば簡単ですが、人であれば普通はルービックキューブが上手い人の操作を見て「一面ずつ揃えていけばいいんだな」とか「下の段、真ん中の段、上の段と順に揃えればいいんだな」などと目標を立てることができます。しかし単純なロボットだと、ランダムに操作するか、しらみ潰しに操作するしかできないでしょう。このように中間の目標を立てるというのはとても有効ですが、人であれば直感的に目標をたてられるものの、その直感をAIで再現することはとても難しいことでした。今回紹介する論文の提案手法は、まさに中間目標を直感的にイメージすることができるようなAIとなっています。
(2) 未来予測で中間目標を見つけ出す
この論文では、ルービックキューブの例のように誰かがプレイする様子を事前に見ることができるタスクを想定しています。またここからは下図(e)の迷路を解くプランニングAIを考えていきます。
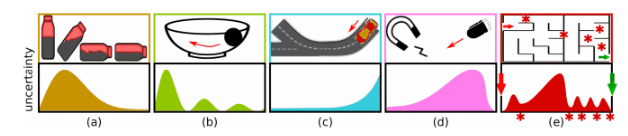
迷路内をスタート地点からゴール地点まで練り歩くルートは様々ありますが、ある時スタート地点を出発した人の未来の状態をイメージすることを考えた時、いくつかの時刻についてその人の状態は、100%イメージすることができます(この迷路には必ず通らなければならない隙間があるため)。この、必ず通らなければならない道を通ることこそが『中間目標』であることは明らかで、いきなり「スタートからゴールまで行け」と言われても困りますが、この中間目標をうまく見つけることでスムーズに課題を遂行することができるはずです。
そして論文ではこの中間目標を見つけるための未来予測の仕方を提案しています。
(3) 時間という概念にとらわれない未来予測AI
既存のAIでも、少し先の未来であれば予測することができました。
https://japanese.engadget.com/2016/11/28/1-5-ai-mit/
これは、画像を入力すると数秒先まで未来を予測して映像を生成するというAIです。
このようなAIは2016年には既にあったのですが、予測する時間が長くなったり、映像内で起こることが連続的ではない場合(カメラの視点が変わる、他のモノが写ってくる、被写体が別の行動を始めるなど)、などには使えず未来の予測には限界があり、また映像も全体的にぼやけたものしか生成できませんでした。
このような既存の未来予測の手法では、ある時刻の画像を見てその次の時刻の画像を生成するということを逐次的に行い、より生成される映像を本物の映像に近づけることを目標にAIを学習させることが一般的な方法です。
しかし、提案手法ではガラッと趣を変え、『あるタスクを遂行中であるという前提で、映像ではなく、綺麗な未来の画像を何枚か生成をすること』に目標に未来予測を行います。
全体的な映像ではなく綺麗な画像を何枚か生成するだけで良いとなると、自然と『そのタスクを遂行するうえで必ず起こる状態の画像を生成すれば良い』となります。なぜなら、必ず起こるかわからない画像を生成することは目標から離れやすくなることであり、また、綺麗な画像を生成するためには、より起こりやすい状態の画像を狙って生成したほうが目標に近づけるためです。
つまり、『あるタスクを遂行中であるという前提で、綺麗な未来の画像を何枚か生成をすること』を指標として未来予測を行うAIを作ると、そのAIが生成する画像は中間目標を描いたものそのものであって、この未来予測AIを使えば高度なプランニングが可能となります。
この、未来予測という課題から時間という概念を捨て、より意味的に大事な未来だけを抽出するような方法を提案した点が、今回の論文の新規性となっています。
(4) 実験
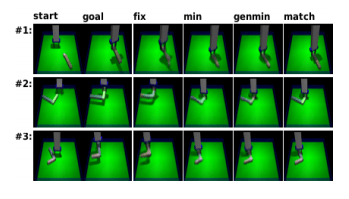
論文ではこの中間目標を見つける手法の有効性を検証するために、『オブジェクトを持ち上げる』というとても簡単なロボットのタスクを扱っています。
『オブジェクトを持ち上げる』というタスクを遂行中であることを前提に、図左側のstartとgoalの画像をAIに入力すると、min/genminの画像が生成されました。これは、ちょうどオブジェクトを掴んでいるところのようなので、狙い通り、中間目標の生成に成功したと言えます。
このタスクは少々単純すぎている気はしますが、理論的には中間状態がいくつ合ってもそれらを列挙できるような手法となっています。また、明示的に中間目標を理解することができるAIというのはこれまでほとんどなかったため、これからのプランニングAIやロボットの研究に良い影響をもたらしそうだと言えるでしょう。
まとめ
今回、中間目標を生成するAIを紹介しました。ロボットのプランニングというのがこれほど難しいものだとは知らなかった、と思われる方も多いかもしれませんが、ロボットAIというのは本当に難しい分野で人間の直感がいかにすごいものかを痛感させられます。今回の提案手法のように、いかに人間の直感をAI,ディープラーニングの得意な手法で表現するかという研究が現在流行っており、だんたんAIが人間に近づいて来ているとも言えるでしょう。
ライター 東京大学 学生
AIメディアライターを大募集中!
「AIをどこよりも分かりやすく、どこよりも身近に。」をコンセプトとした、
AI論文翻訳メディア『AI-SCHOLAR』のライターをWanted!!
【仕事内容】
・最新のAI論文を翻訳/解説記事の執筆
研究で読んだ論文をついでに翻訳解説し記事を執筆する仕事です。
署名記事で書いて頂き、自分の会社やブログへのリンクを貼って頂くのもOK。
個人のブランディングや知名度アップに使って頂いても構いません。
【ライター特典】
- 1記事単価:10,000円~
- 投稿記事数やライタ紹介によって特別特典有り
- 機械学習研究者のコミュニティー紹介
- 機械学習イベント/交流会への無料招待
- 有名企業や機械学習に力を入れている企業へのの就活支援有り(希望制)
【ライターメンバー】
- 動機理由
自分自身の研究を広めたい
機械学習をビジネスに活かすきっかけをつくりたい
研究を活かした仕事をしたい
アルバイトをする時間がない
学習内容をアウトプットしたい
AI-SCHOLARのライターコミュニティーに入りたいetc..
- 所属大学
東京大学/東京大学院/東京工業大学/東京工業大学学院/筑波大学/早稲田大学/慶応義塾大学院/慶応義塾大学/神戸大学/名古屋大学/東北大学/会津大学etc..
- 研究内容
ソフトコンピューティング/ロボティクス/汎用AI/関連領域etc..
_______________________________________
そもそもAI(特にディープラーニング)は発展途上の技術であり、急激な勢いで進化しています。毎日、さまざまな論文が発表され、「最新の手法」が数週間で変わるぐらいその変化は激しいものです。
一方で、AIのビジネス活用の現場には、情報の非対称性が存在し、”何がほんとか分からない”と言う声も多く聞きます。ビジネスサイドのAI技術に対する理解不足が大きいため、真の課題解決やイノベーションに結びついていません。ブームに乗じて、それほど性能が高くないAIサービスや製品を見る機会も随分増えました。さらに今後の伸びしろに懐疑的な声も上がり始めています。
このサイトを見ることでAIの可能性を知り、わくわくしたり、考えたり、未来へ想いを巡らせる。そんな理解を深める”少しのきっかけ”を与えることができるメディアになれたらいいなと思っています。
「AI-SCHOLAR」では現在、このようなビジョンに共感してくれるエンジニアや研究者のライターを募集しています。
自分ならもっと良いコンテンツが書けるのに。。という想いを一度でも感じたことがある人であれば、
まずはAI-SCHOLARライターの扉を叩いて下さい。




この記事に関するカテゴリー